

Khi ô tô di chuyển trên đường thì chịu nhiều ảnh hưởng của các yếu tố, đặc biệt là các điều kiện có thể làm mất cân bằng ổn định của xe chẳng hạn như: khi xe quay vòng quá gấp hoặc độ bám trên các bánh là khác nhau khi chạy trên đường, cũng có thể là do gió tác động ngang vào thân xe hoặc là có lực ngang tại bánh xe. Các yếu tố này ảnh hưởng rất lớn đến quá trình chuyển động của ô tô. Xuất phát từ những nguyên nhân trên, các nhà sản xuất ô tô đã nghiên cứu thiết kế, sản xuất nên hệ thống cân bằng điện tử trên ô tô. Như vậy, hệ thống này được coi là “vị cứu tinh”, “lá bùa hộ mệnh” của ô tô khi chuyển động trên đường.
Hình 1. Đèn hệ thống cân bằng điện tử trên đồng hồ taplo.
Hệ thống cân bằng điện tử trên ô tô được ra đời năm 1995 nhằm đáp ứng khắc phục những tác nhân gây lật xe. Một hệ thống có cùng chức năng nhưng mỗi hãng có mỗi tên gọi khác nhau cụ thể như:
ESP - Electronic Stabilization Program (Hệ thống ổn định điện tử) - Mecerdes, Audi, Chrysler, Dodge, Huynhdai, Kia, Jeep, Renault.
ESC - Electronic Stability Control (Hệ thống điều khiển ổn định điện tử) - Ford
DSC - Dynamic Stability Control (Hệ thống điều khiển ổn định động học) - BMW, MINI, Jaguar, Land Rover, Mazda
VSA - Vehicle Stability Assist (Hệ thống hỗ trợ ổn định xe) - Honda, Acura
VSC - Vehicle Stability Control (Hệ thống điều khiển độ ổn định xe) - Toyota, Lexus
VDC - Vehicle Dynamic Control (Điều khiển động lực học xe) - Alfa Romeo, Nissan
PSM - Porche Stability Management (Hệ thống kiểm soát ổn định xe Porsche) – PSM.
Trên xe máy thì hệ thống này có tên là MSC (Motocycle Stability Control).
Hệ thống cân bằng điện tử kết hợp với hệ thống phanh ABS (Anti-lock Braking System – Hệ thống phanh chống hãm cứng). Hệ thống cân bằng điện tử sẽ thu thập các tín hiệu từ các cảm biến như cảm biến gia tốc dọc, cảm biến gia tốc ngang, cảm biến tốc độ của các bánh xe và cả cảm biến góc quay vô lăng. Các tín hiệu từ cảm biến này sẽ là cơ sở phân tích tình trạng hoạt động của xe. Tín hiệu từ các cảm biến báo về hộp điều khiển trung tâm. Tại hộp điều khiển trung tâm sẽ phân tích từ dữ liệu đầu vào để đưa ra tín hiệu xử lý đến cơ cấu chấp hành. Nếu phân tích dữ liệu có nằm trong tình trạng xe bị mất cân bằng thì ECU sẽ ra lệnh cho phanh một số bánh xe bằng cách tăng áp suất dầu tại cơ cấu phanh (xi lanh con) ở các bánh xe, can thiệp giảm tốc độ động cơ và cả hộp số.
Để rõ hơn về quá trình điều khiển này, tác giả xin được phân tích cụ thể từ hình ảnh.
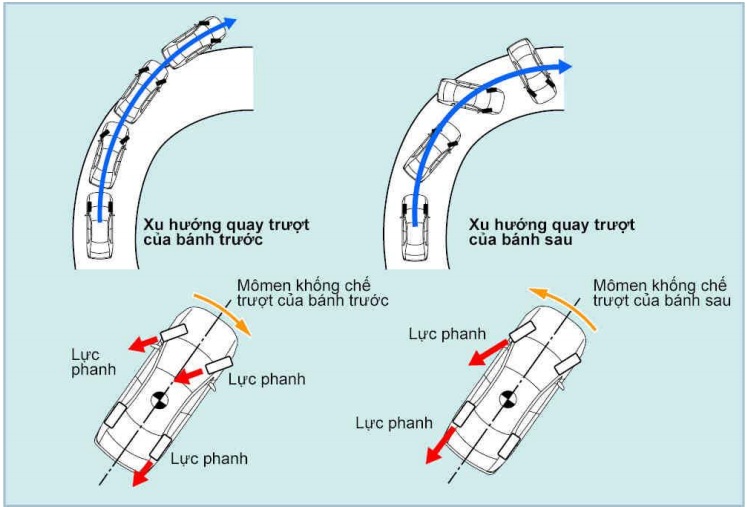
Hình 2. Nguyên lý hoạt động của hệ thống cân bằng điện tử
Ô tô chuyển động khi quay vòng có 3 trạng thái:
-
Quay vòng trung tính nghĩa là bán kính quay vòng thực tế trùng với bán kính quay vòng lý thuyết.
-
Quay vòng thiếu (understeering) là trường hợp bán kính quay vòng thực tế lớn hơn bán kính quay vòng lý thuyết.( Ô tô hình bên trái)
-
Quay vòng thừa (oversteering) là trường hợp bán kính quay vòng thực tế nhỏ hơn bán kính quay vòng lý thuyết (Ô tô hình bên phải)







Không có nhận xét nào:
Đăng nhận xét
Cảm ơn bạn rất nhiều ạ